Структурная схема силовой цепи
Из теории асинхронных двигателей (АД) известно, что при частотном управлении их характеристики определяются тремя переменными: частотой напряжения питания f1 или относительным параметром α=f1/f1н, напряжением питания U1 или относительным параметром γ=U1/U1н, частотой скольжения fs (частотой ротора f2) или параметром абсолютного скольжения β= fs /f1н=αs, который можно рассматривать как промежуточный параметр нагрузки. Под статическими характеристиками частотного регулирования будем понимать зависимости параметров АД от частоты α в заданном диапазоне изменения частот и нагрузок, обеспечивающие требуемые тяговые характеристики автономного транспортного средства.
Статическая характеристика γ(α), определяемая как закон частотного управления, в данном представлении является одной из основных характеристик регулирования АД.
Другой важной характеристикой регулирования является зависимость μ(α)=[М/Мн] (α). Её вид определяется тяговой характеристикой F(v) автономного транспортного средства. Характеристика μ(α) содержит три участка (см. рис. 9.2): постоянства пускового момента μ=μпред (линия АБ), постоянства мощности (кривая Б-В-Г); ограничения частоты α=αмакс (линия Г-Д).
Для формирования характеристики μ(α) с учётом поддержания на заданном уровне значений КПД, коэффициента статической перегрузки и коэффициента мощности необходимо одновременное регулирование параметров α, β, γ и др., связанных между собой сложными функциональными зависимостями.
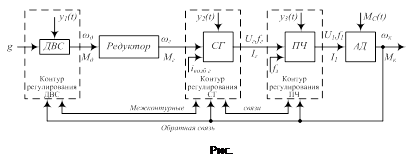
На рис. 9.3 приведена упрощенная структурная схема силовой цепи трансмиссии переменного тока. Входными параметрами для синхронного генератора СГ являются угловая частота генератора ωг и ток возбуждения iвозб г, регулируемым параметром – напряжение генератора Uг (или γг).
Входными параметрами преобразователя частоты ПЧ являются напряжение γг и частота следования импульсов управления fз, регулируемым параметром – частота α питающего АД напряжения γ.
Полная механическая мощность на валу АД определяется соотношением
Р=Р2+Рмех≡Мω.
Полезная мощность, реализуемая генератором
Р2≡М2ω=ηР1,
а приведённая
![]() . (9.1)
. (9.1)
Момент на валу генератора
![]() ,
,
или в относительных единицах
μ2= μη2 / η2н, (9.2)
где η2 – КПД, учитывающий только механические потери АД.
Угловая скорость ротора АД в относительных единицах с учётом выражений (9.1) и (9.2) определяется как
![]() .
.
С учётом того, что электромагнитный момент, выраженный в относительных единицах, равен ![]() , расчётная формула для определения относительной угловой скорости преобразуется к виду
, расчётная формула для определения относительной угловой скорости преобразуется к виду
![]() . (9.3)
. (9.3)
Из последнего соотношения видно, что входными параметрами при регулировании АД являются α, β и γ, а регулируемыми – момент μ (угловая скорость ω*). Основное внешнее возмущающее воздействие, действующее на АД, является моментом сопротивления вращению, который определяет возмущающие воздействия на остальные агрегаты силовой цепи трансмиссии.
Актуально о транспорте
Расчёт потребных размеров движения
Характеристики электровоза ВЛ 10 и тепловоза ТЭМ 1: ВЛ 10[2]: Сила тяги (Fкр) – 46000 кгс; Расчётная скорость (U р)– 46,7 км/ч; Учётная масса (Р) – 180 т; Длина электровоза (lлок) – 33 м. ТЭМ 1: Сила тяги (Fкр) – 35400 кгс; Учётная масса – (Р) 121 т; Длина электровоза (lлок) – 17 м. Определение сре ...
Выбор типа вентилей
Используя данные таблицы подстановок и построенные на данных таблицы диаграммы, выберем тип и класс неуправляемого вентиля, обеспечивающего наилучшие технико-экономические показатели при разных значениях скорости охлаждающего воздуха (12; 6 и 0 м/сек). Наилучшие технико-экономические показатели вып ...
Форсунки
Форсунка предназначена для впрыска топлива в камеру сгорания и распыливания его на мелкие частицы. Форсунки, применяемые на дизелях, разделяют на закрытые и открытые. Закрытымитыми называют такие форсунки, у которых топливопровод высокого давления в период между впрысками топлива разобщен с камерой ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт