Трансмиссии переменного тока
Трансмиссии постоянного тока являются наиболее простыми, так как двигатели питаются непосредственно от генератора без промежуточных силовых преобразователей и любые характеристики трансмиссии получаются регулированием магнитных потоков генератора и двигателей по цепям возбуждения, мощность которых не превышает 1…2,5% от номинальной мощности тяговых машин.
Основным способом регулирования скорости транспортных средств с асинхронными двигателями является изменение частоты тока, питающего двигатели независимо от частоты тока генератора, приводимого ДВС. Для этого используют тиристорные преобразователи, в которых частоту выходного тока можно изменять независимо от входной.
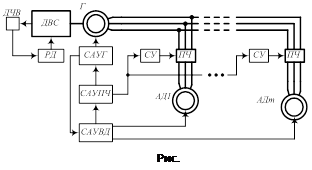
В качестве примера на рис. 9.1 приведена обобщённая схема привода теплоэлектрического подвижного состава с асинхронными двигателями (АД) и преобразователями частоты ПЧ. ДВС приводит во вращение вал тягового генератора Г, в качестве которого может использоваться как машина постоянного, так и переменного тока. В силу низкой надёжности коллекторно-щёточного узла первых их применение неперспективно, поэтому далее рассматриваем только синхронные генераторы.
Трёхфазное напряжение от генератора подводится к ПЧ, который может быть выполнен по схеме со звеном постоянного тока (ПЧПТ) или с непосредственной связью выходной и входной цепей (НПЧ).
В ПЧПТ трёхфазное напряжение генератора преобразуется выпрямителем в постоянное, подаваемое на вход инвертора, где преобразуется в трёхфазное переменной частоты. Нагрузкой инверторов являются тяговые АД.
В НПЧ одни и те же тиристоры поочерёдно работают в выпрямительном и инверторном режимах. Управление тиристорами осуществляется как по частоте входного тока (генератора), так и по выходной частоте, которая задаётся системой управления.
При АД возможны три варианта исполнения ПЧ:
– один преобразователь на общую нагрузку;
– несколько параллельно работающих преобразователей на общую нагрузку;
– индивидуальная нагрузка преобразователей.
Приведённый на рис. 9.1 вариант привода относится к первой разновидности.
асинхронный трансмиссия переменный постоянный
Каждый ПЧ имеет свою систему управления СУ, подающую в определённой последовательности отпирающие импульсы на соответствующие тиристоры преобразователя. Для управления СУ используется САУПЧ, а в случае применения синхронных двигателей необходимо предусмотреть и систему управления возбуждением САУВД. Для управления тяговым генератором используется система управления САУГ, а для управления тепловым двигателем – СУТД, на которую поступает сигнал от датчика частоты вращения (ДЧВ) вала ДВС.
Все системы могут работать самостоятельно, однако целесообразным следует считать связанное управление.
- Структурная схема силовой цепи
- Передачи переменно-переменного тока
- Передачи переменно-постоянного тока
Актуально о транспорте
Особенности работы рабочей тормозной системы ГАЗ-3307
Тормозные механизмы передних и задних колес одинаковы по конструкции и отличаются размерностью отдельных входящих деталей. Тормозные механизмы передних колес имеют цилиндры с поршнями 35 мм и накладки шириной 80 мм. Тормозные механизмы задних колес имеют цилиндры с поршнями 38 мм и накладки шириной ...
Ведущая часть
Ведущая часть сцепления (рис.1.), состоящая из кожуха 11, нажимного диска 8 и нажимной пружины 5, выполнена неразъемным узлом и имеет жесткое соединение с маховиком. Эта часть сцепления предназначена для передачи крутящего момента на ведомую часть сцепления. Кожух 11 сцепления отштампован из специа ...
Определение количества постов и линий ТО и ТР
Количество универсальных постов определяется исходя из ритма производства и такта поста. Все виды ТО для автомобилей КамАЗ выполняются на поточных линиях, так как суточные программы видов ТО соответствуют требованиям: для ТО-2 минимальное количество обслуживаний – 5-6 , а для ТО-1 – 12-15, так как ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт