Передачи переменно-переменного тока
При движении машины по пути с переменным сопротивлением в общём случае изменяют я одновременно частота тока, напряжение, подводимое к асинхронным двигателям, магнитный поток и сила тока в их обмотках. Водитель, управляя педалью, задает мощность теплового двигателя. При заданном положении педали величины, характеризующие режимы работы двигателей, должны изменяться автоматически. В приводе с двигателем АД и преобразователем ПЧПТ имеются два регулируемых параметра: сила тока возбуждения генератора частота тока на выходе инвертора. Соответственно этому помимо регулятора теплового двигателя в приводе предусматривается и система автоматического управления генератором (САУГ) и система управления преобразователем (САУПЧ). Эти системы выполняют следующие функции: 1) поддержание постоянной мощности теплового двигателя; 2) ограничение силы тока и напряжения генератора и преобразователя; 3) если тепловой двигатель работает с переменной скоростью, программное управление моментом сопротивления генератора в зависимости от частоты вращения по линии наибольшей экономичности; 4) управление режимом асинхронных двигателей по определенной программе, обеспечивающей работу их с наибольшим к. п. д.
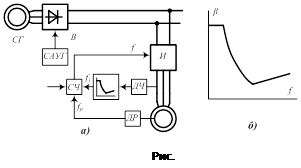
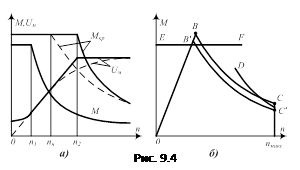
Распределение этих функций между САУГ и САУПЧ может быть различным. Первые три функции могут выполняться так же, как и в приводе постоянного и переменно-постоянного тока системой управления генератора САУГ. В этом случае САУПЧ управляет режимом работы асинхронных двигателей. Возможно также выполнение первых трех функций в САУПЧ, тогда САУГ обеспечивает управление напряжением в зависимости от частоты по одной из программ (см. рис. 9.4). Управление режимом двигателя АД в АУПЧ может быть также различным. На рис. 9.5 приведена функциональная схема системы САУПЧ с программным управлением абсолютным скольжением. Характер зависимости абсолютного скольжения от частоты тока (рис. 9.5б) определяется характером изменения мощности и напряжения (например, для по казанной на рис. 9.4а зависимости (сплошные линии) момента М и напряжения Uм от частоты вращения абсолютное скольжение сохраняется постоянным при неизменном моменте, когда напряжение увеличивается пропорционально частоте. При таком же изменении напряжения, но при постоянной мощности момент и абсолютное скольжение уменьшаются. При сохранении постоянных величин мощности и напряжения абсолютное скольжение вновь увеличивается с ростом частоты тока.
В схеме САР с ПЧПТ, показанной на рис. 9.5, частотным датчиком ДР измеряется частота вращения ротора, пропорциональная скорости движения. Сигнал частоты вращения ротора подается к сумматору частоты СЧ. На него же от функционального преобразователя скольжения ФПС подаётся сигнал, формируемый по определённой для каждого типа двигателя зависимости β(f). Выходной сигнал сумматора, пропорциональный сумме частоты вращения ротора и абсолютного скольжения, т.е. требуемой частоты тока инвертора И, подается на вход системы управления преобразователем частоты. Ввиду малой величины абсолютного скольжения по сравнению с частотой тока измерение частоты вращения ротора должно быть очень точным. Измерение по напряжению тахогенератора такой точности не обеспечивает. Поэтому применяют импульсные датчики и частоту измеряют цифровыми устройствами по количеству импульсов. Преимуществом такой схемы является то, ЧТО частота каждого двигателя задается в зависимости от частоты вращения его ротора, и разность нагрузок отдельных двигателей не зависит от радиуса качения колеса, разности скоростей при повороте машины и т.д., а определяется только точностью измерения частоты вращения ротора и точностью задания скольжения. Недостатком является относительная сложность схемы, а так же необходимость иметь датчик на каждом двигателе. При такой схеме задающий генератор в системе САУПЧ не обязателен, так как требуемая для нее частота может быть получена от сумматора. При изменении мощности теплового двигателя для оптимального режима асинхронного двигателя может потребоваться изменение скольжения. В этом случае программа ФПС может изменяться посредством управляющего сигнала УС.
Актуально о транспорте
Расчёт стоимости перевозки груза в рефконтейнерах
1) Перевозка осуществляется полностью автомобильным транспортом от пункта погрузки до пункта выгрузки без перегрузок, т.е. из Мату Гросу до Риу-Гранди (3100км). Самые крупные морские перевозчики на Южноамериканском направлении являются Maersk и Hamburg Zud. У обоих морских линий есть услуга precarr ...
Корректирование трудоемкости ТО и ремонтов
Нормативная трудоемкость ТО и ремонтов подлежит корректированию с учетом условий эксплуатации автомобилей по формулам tЕО = tНЕО · К2 · К5, чел.-ч.; (15) t1 = tН1 · К2 · К5, чел.-ч.; (16) t2 = tН2 · К2 · К5, чел.-ч.; (17) tтр = tНтр · К1 · К2 · К3 · К4 · К5 , чел.-ч./1000км, (18) где tЕО, t1, t2, t ...
Форсунки
Форсунка предназначена для впрыска топлива в камеру сгорания и распыливания его на мелкие частицы. Форсунки, применяемые на дизелях, разделяют на закрытые и открытые. Закрытымитыми называют такие форсунки, у которых топливопровод высокого давления в период между впрысками топлива разобщен с камерой ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт