Передачи переменно-переменного тока
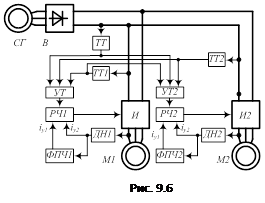
Более простой является схема (рис. 9.6), в которой частота тока задаётся в зависимости от напряжения, подводимого двигателю. Характер зависимости Uм(f) определяется функциональным преобразователем ФПЧ, на вход которого подается подается от датчика ДП напряжение переменного тока. Выходной сигнал преобразователя ФПЧ поступает в регулятор частоты РЧ и от последнего – к задающему генератору в систему управления преобразователем частоты.
Для поддержания постоянного момента и магнитного потока двигателя при малых скоростях (см. рис. 9.4) в качестве функционального преобразователя может быть использован дроссель, активное сопротивление которого мало по сравнению с индуктивным. В этом случае сила тока на выходе дросселя
![]() ,
,
где U-напряжение на выходе инвертора; R1 – суммарное активное электрическое сопротивление цепи дросселя; L1 – величина индуктивности дросселя.
При постоянной индуктивности дросселя величина выходного тока, который используется в качестве управляющего сигнала, приблизительно пропорциональна магнитному потоку. В регуляторе РЧ (см. рис. 9.6) этот сигнал сравнивается с задающим сигналом, и по отклонению регулирующего сигнала от задающего формируется выходной сигнал (поступающий на задающий генератор САУПЧ) такого направления, при котором изменение частоты тока приводит к устранению отклонения. Таким образом, изменением частоты тока поддерживается постоянным управляющий сигнал, т.е. заданное отношение напряжения к частоте или приблизительно постоянный магнитный поток. Влияние активного сопротивления заключается в том, что при частоте f=0 для поддержания заданной величины тока i1 требуется некоторое напряжение U0, что полезно для компенсации активного падения напряжения в двигателях при малых частотах и более точного поддержания магнитного потока.
Для поддержания постоянного напряжения в области высоких частот функциональный преобразователь должен подавать управляющий сигнал, пропорциональный напряжению. На вход РЧ подаются управляющие сигналы iу1 и iу2, пропорциональные магнитному потоку и напряжению соответственно. При одновременном действии обоих сигналов реализуется промежуточная программа управления Uм(f), близкая к ![]() Меняя управляющие сигналы, можно изменять программу Uм(f).
Меняя управляющие сигналы, можно изменять программу Uм(f).
Если ко всем инверторам подводится одинаковое напряжение, что имеет место при неуправляемых выпрямителях, то задающий сигнал является общим для всех инверторов, и они работают с одинаковой выходной частотой тока. Это может привести к не равномерному распределению нагрузки. Выравнивание нагрузки возможно при индивидуальных управляемых выпрямителях, напряжение каждого из которых должно изменяться в зависимости от нагрузки или частоты вращения роторов. Однако это сильно усложняет систему управления. Более просто можно выровнять нагрузки, добавив узел выравнивания в системе САУПЧ. для этого предусматриваются датчики тока ТТI, ТТ2 каждого асинхронного двигателя и датчик общего тока ТТ, сигналы которых поступают в узел сравнения токов УТ.
Актуально о транспорте
Описание работы стенда СКСКТ контроля ведомых мостов
троллейбуса
Стенд СКСКТ входит в группу стендов, действующих по принципу «подвижная дорога». Они обладают большой точностью и позволяют производить многократные замеры боковых сил, а также регулирование значения этих сил непосредственно на стенде, что крайне важно для условий троллейбусных депо. Стенды этой гр ...
Диагностика неисправностей двигателя автомобиля и методы их
устроения
Причина: повышенное сопротивление движению автомобиля Способ устранения неисправности: Проверьте и отрегулируйте давление в шинах, углы установки передних колес, работу тормозной системы Способ обнаружения неисправности: визуальный Причина: неисправен регулятор давления Способ устранения неисправно ...
Расчет и подбор типовых опор контактной сети
Погонные (распределенные) на нагрузки на провода контактной подвески создаются за счет веса проводов и веса гололеда на проводах (вертикальные нагрузки) и за счет действия ветра на провода подвески (горизонтальные нагрузки). Часть погонных нагрузок была определена ранее; g - нагрузка от собственног ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт