Основные технические данные двигателей ТЛ-2К1 и НБ-418К6 и их сравнительный анализ
Мощность, развиваемая тяговыми двигателями электровоза, практически не ограничена мощностью источника энергии. Ведь электровоз получает энергию через контактную сеть и тяговые подстанции от энергосистем, обычно обладающих мощностями, несоизмеримо большими мощности электровозов. Поэтому при создании электровозов стремятся получить характеристику, показанную на рис. 4, б штриховой линией. Электровоз, оборудованный двигателями с такой характеристикой, может развивать значительную силу тяги на крутых подъемах при сравнительно высокой скорости. Конечно, мощность, потребляемая тяговыми двигателями в условиях больших сил тяги, повышается, но это не приводит к резким перегрузкам питающей системы.
Двигатели ТЛ-2К1 самые распространенные. Достоинства их трудно переоценить: простота устройства и обслуживания, высокая надежность, низкая стоимость, несложный пуск. Однако, как известно, частота вращения асинхронного двигателя почти постоянна и мало зависит от нагрузки, она определяется частотой подводимого тока и числом пар полюсов двигателя. Поэтому регулировать частоту вращения таких двигателей, а, следовательно, и скорость движения поездов можно только изменением частоты питающего тока и числа пар полюсов, что трудно осуществить. Кроме того, как уже отмечалось выше, для питания таких двигателей требуется устраивать сложную контактную сеть.
Благодаря развитию полупроводниковой техники оказалось возможным создать преобразователи однофазного переменного тока в переменный трехфазный и регулировать их частоту.
В какой же степени отвечают требованиям, предъявляемым к тяговым двигателям, электрические машины постоянного тока? Напомним, что эти машины — генераторы и двигатели — различаются по способу возбуждения.
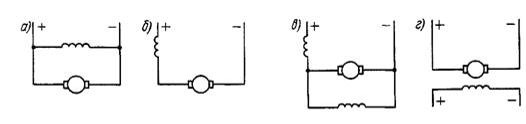
Обмотка возбуждения может быть включена параллельно обмотке якоря (рис. 5, а) и последовательно с ней (рис5, б). Такие двигатели называют соответственно двигателями параллельного и последовательного возбуждения. Используют также двигатели, у которых имеются две обмотки возбуждения — параллельная и последовательная. Их называют двигателями смешанного возбуждения (рис. 5, в). Если обмотки возбуждения включены согласно, т. е. создаваемые ими магнитные потоки складываются, то такие двигатели называют двигателями согласного возбуждения; если потоки вычитаются, то имеем двигатели встречного возбуждения. Применяют и независимое возбуждение: обмотка возбуждения питается от автономного (независимого) источника энергии (рис. 5, г).
Рисунок 5. Схемы, проясняющие способы возбуждения двигателей постоянного тока
Чтобы оценить возможности регулирования частоты вращения двигателя постоянного тока, напомним, что при вращении в магнитном поле проводников обмотки якоря двигателя в них возникает (индуцируется) электродвижущая сила (э. д. с). Направление ее определяют, пользуясь известным правилом правой руки. При этом ток, проходящий по проводникам якоря от источника энергии, направлен встречно индуцируемой э. д. с. Напряжение, подведенное к двигателю, уравновешивается э. д. с, наводимой в обмотке якоря, и падением напряжения в обмотках двигателя.
Значение э. д. с. пропорционально магнитному потоку и частоте вращения, с которой проводники пересекают магнитные силовые линии. Поэтому без ощутимой ошибки можно считать, порциональность) или магнитный поток возбуждения (обратная пропорциональность).
Как зависит вращающий момент от тока якоря? Если подключить проводники обмотки якоря двигателя к электрической сети, то проходящий по ним ток, взаимодействуя с магнитным полем полюсов, создаст силы, действующие на каждый проводник с током. В результате совместного действия этих сил создается вращающий момент М, пропорциональный току якоря и магнитному потоку полюсов.
Чтобы построить тяговую характеристику двигателя постоянного тока, необходимо установить, как изменяются частота вращения п и момент М в зависимости от тока при разных способах возбуждения двигателей.
Для двигателей с параллельным возбуждением можно считать, что ток возбуждения не изменяется с изменением нагрузки.
Актуально о транспорте
Подбор основного оборудования для лаборатории
Расширить и закрепить знания о способах поддержания работоспособности шин, об оборудовании для балансировки колёс, приобрести практические навыки в балансировке колёс. Станок ММ-18, шина в сборе с диском, балансировочные грузики, набор инструмента. 1. Пройти инструктаж на рабочем месте и расписать ...
Расчет элементов горочного цикла и составление технологического графика
работы горки
Разработка технологического процесса работы горки должна производиться, исходя из условия максимального совмещения операций по расформированию и формированию поездов и максимальной параллельности всех горочных операций с процессом роспуска и накопления вагонов. Это достигается высоким уровнем механ ...
Нормативные документы
Министерство путей сообщения Российской Федерации Приказ N 30 от 26 июля 2002 года "Об утверждении Правил перевозок пассажиров, багажа и грузобагажа на федеральном железнодорожном транспорте" Зарегистрирован в Минюсте РФ 8 августа 2002 г. Регистрационный N 3675 В соответствии со статьей 5 ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт