Назначение и устройство
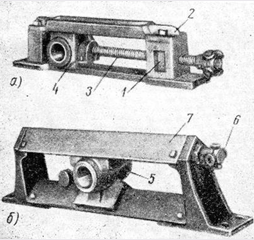
Рис. 2 Натяжные устройства ленточного конвейера.
а – с выдвижным винтом; б – с неподвижным винтом.
Ролики поддерживающих опор (рис. 3 б. в.) монтируются на подшипниках качения с различными уплотнениями. Поддерживающие опоры грузонесущей (рабочей) ветви бесконечной ленты бывают одно-, двух-, трёх- и пятироликовые. В конвейерах однороликовой опорой лента имеет плоскую форму, при двух и более роликах в опоре лента принимает желобчатую форму. Оси смежных роликов в опоре наклонены один к другому под углом 14-30*. Опоры для холостой ветви ленты обычно однороликовые.
Общая длинна роликов в опоре должна быть на 100-200 мм больше ширины ленты. Применяют опоры с роликами из пластмасс, а также с эластичными осями и пружинами.
Для смягчения ударов материала о ленту в конвейерах для крупнокусковых грузов в пункте загрузки устанавливают опоры с амортизирующими роликами, покрытыми резиновыми кольцами. Через четыре-пять обычных роликоопор устанавливают центрирующие роликоопоры (рис 3 в ) с вертикальными боковыми роликами, служащими для предупреждения бокового смещения ленты в процессе работы.
ленточный конвейер груз транспортирующий
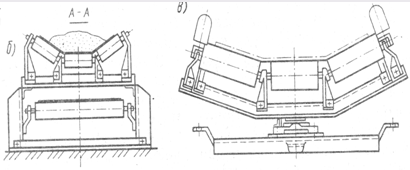
Рис 3. Ролики поддерживающих опор
Расстояние между опорами для рабочей ветви принимают в зависимости от ширины ленты Вл, массы каждой единицы штучного груза или насыпной массы груза, для которого для которого предназначен конвейер. Эти расстояния принимают в интервале 0,8-1,6м. В пунктах подачи груза на ленту расстояние между опорами уменьшают, а при холостой ветви увеличивают примерно в 2 раза.
Актуально о транспорте
Анализ рынка автосервисных услуг в городе Сыктывкаре
Формирование спроса и стимулирование сбыта производимых услуг автосервисом играет важную роль для его успешной деятельности. Возросшая рыночная конкуренция в сфере автосервиса вынуждает предприятия по обслуживанию и ремонту автомобилей на все большие уступки потребителям в сбыте своих услуг с помощ ...
Расчёт привода сцепления
Привод сцепления гидравлический Рис. 2 Схема гидравлического привода сцепления. Удобство управления сцеплением обеспечивается правильным выбором передаточного числа привода, чтобы иметь: 1.Оптимальную величину перемещения педали, не более: для легковых автомобилей – Sпед= 160 мм; 2.Максимальную вел ...
Описание работы стенда СКСКТ контроля ведомых мостов
троллейбуса
Стенд СКСКТ входит в группу стендов, действующих по принципу «подвижная дорога». Они обладают большой точностью и позволяют производить многократные замеры боковых сил, а также регулирование значения этих сил непосредственно на стенде, что крайне важно для условий троллейбусных депо. Стенды этой гр ...
Разделы
- Главная
- Пассажирские станции
- Водный транспорт
- Электрооборудование автомобилей
- Машины для земляных работ
- Сортировочная станция
- История ПДД
- Транспорт